The SCF-G : 2nd OGSE Facility for GNSS

Based on the experience matured with the SCF, we designed and built the SCF-G, which is operative in the same Clean Room infrastructure of INFN, the SCF_Lab.
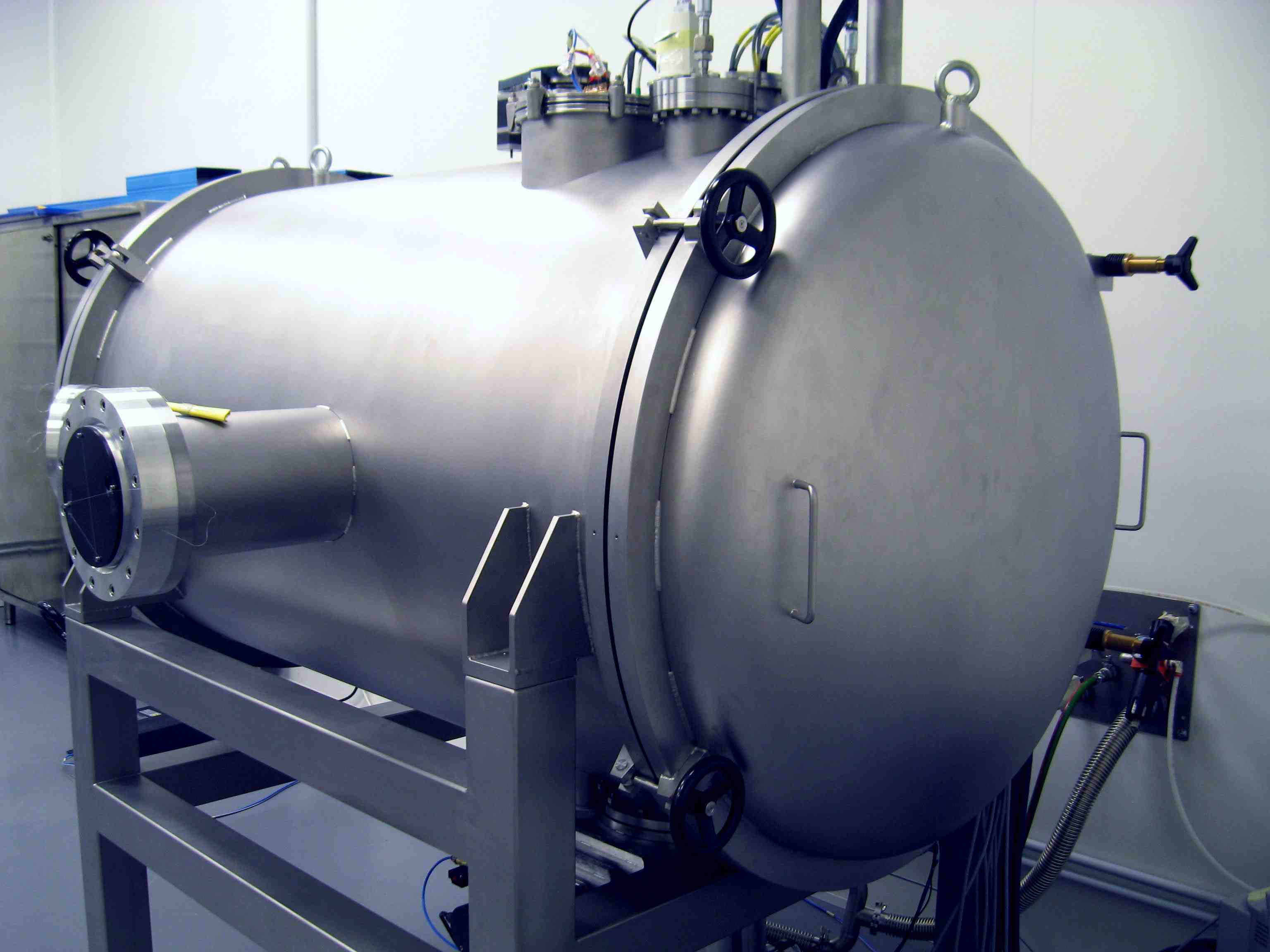
It is a cylindrical steel cryostat closed on front and back by two steel shells. The front shell is equipped with a solar window, a flanged opening through which the solar load produced by a SS hits retroreflectors and LRAs; the back shell, instead, provides the access for payloads' assembly. As in the SCF on the right side of the cryostat there are two windows are located, the IR window at an angle of 45° angle with respect to the longitudinal axis of the camera and the laser window, orthogonal to the aforementioned axis.
The copper shroud inside the cryostat, which brings the temperatures down to ~77K, has a copper coil, welded onto the external surface of the shield, where LN2 flows. The shroud is then covered with MLI to enhance thermal insulation and reduce the consumption of nitrogen; this is accomplished however not only with thermal insulation but also with a flow meter positioned at the very end of the circuit, which finely regulates nitrogen's flow rate (description of the software for remote control will be presented in the next chapter). In order to monitor the temperature uniformity of the shroud 22 PT100 probes are located on the shroud surface. In case of emergency, to recover quickly the room temperature, the shroud is covered with a system of heating resistant tapes allowing the temperature to rise at a 1K/min rate. The vacuum is achieved using a two stage pumps system, a rotatory pump for low vacuum and a turbo-molecular pump for high vacuum. The pressure value is remotely monitored on a control PC.
Inside the shroud there is a payload support plate to hold the LRAs inside the SCF-G; it is sustained by a mechanical shaft connected to an external motor outside the cryostat, responsible for the rotary movement around this vertical axis. The plate can be also moved along two axis, horizontal and vertical, using two motors with the slide linked to the support plate. The control of these three motors is managed by the remote control PC.
The support plate has the important function of finely controlling the temperature of LRAs at fixed values regardless the temperature of the shroud; this is realized with a serpentine inside the plate in which a liquid (managed by a chiller positioned outside of the cryostat) flows.
A newly built SS is positioned in front of the solar window, as in the SCF, with a beam diameter of 350 mm and ±5% uniformity. The solar beam is here realized by just one lamp. Around the solar window flange, a pipe in which water flows, has the function to reduce the heating of the solar window induced by the SS; its temperature is anyhow remotely controlled with a PT100 probe.
The performance of the LRAs is monitored with thermometry and optical subsystems.
Thermometry subsystem has the same non-invasive and invasive approaches described for the SCF, using a new IR camera and a system of PT100 probes on the payloads and on the cold shroud. For the SCF-G, a new monitor software approach has been developed.
The optical circuit for FFDP measurements has the same concept described earlier for the SCF, but with some fundamental variations in order to make the integration of interferometric measurements possible. Indeed, for the ETRUSCO-2 project, a commercial Fizeau interferometer for concurrent measurement of FFDP and wavefront of retroreflectors has been bought. One of the most important features of this hardware is the set of accurate measurements performed despite vibrations and air turbulence, fundamental features due to the SCF_Lab environment and arrangement.